Welcome to the NPM3D Benchmark Suite!
NPM3D is "Nuage de Points et Modélisation 3D" in French and means 3D Point Cloud and Modeling.
This website provides datasets and benchmarks around 3D point clouds and its applications.
NPM3D is also a research group : https://www.caor.minesparis.psl.eu/presentation/point-cloud-and-3d-modeling/
Changelog
5 December 2023: New dataset ParisLuco3D, specifically designed for cross-domain evaluation of LiDAR Perception tasks here
27 December 2022: New dataset SimKITTI32, dataset created simulating a Velodyne HDL-32 inside a scene modeled from the SemanticKITTI dataset (acquired using a Velodyne HDL-64) here
28 February 2022: New dataset Riedones3D, 2207 3D scans of coins for pattern registration and die clustering here
25 November 2021: New dataset Paris-CARLA-3D, a real and synthetic outdoor point cloud dataset for challenging tasks in 3D Mapping here
1 October 2021: New dataset KITTI-CARLA, a KITTI-like dataset generated by CARLA Simulator here
10 Decembre 2019: Added raw data for the Paris-Lille-3D dataset
1 September 2018: The Classification ranking page is now available : here
10 August 2018: We release the test dataset based on 10 coarse classes to submit on our Classification Benchmark. The link is here.
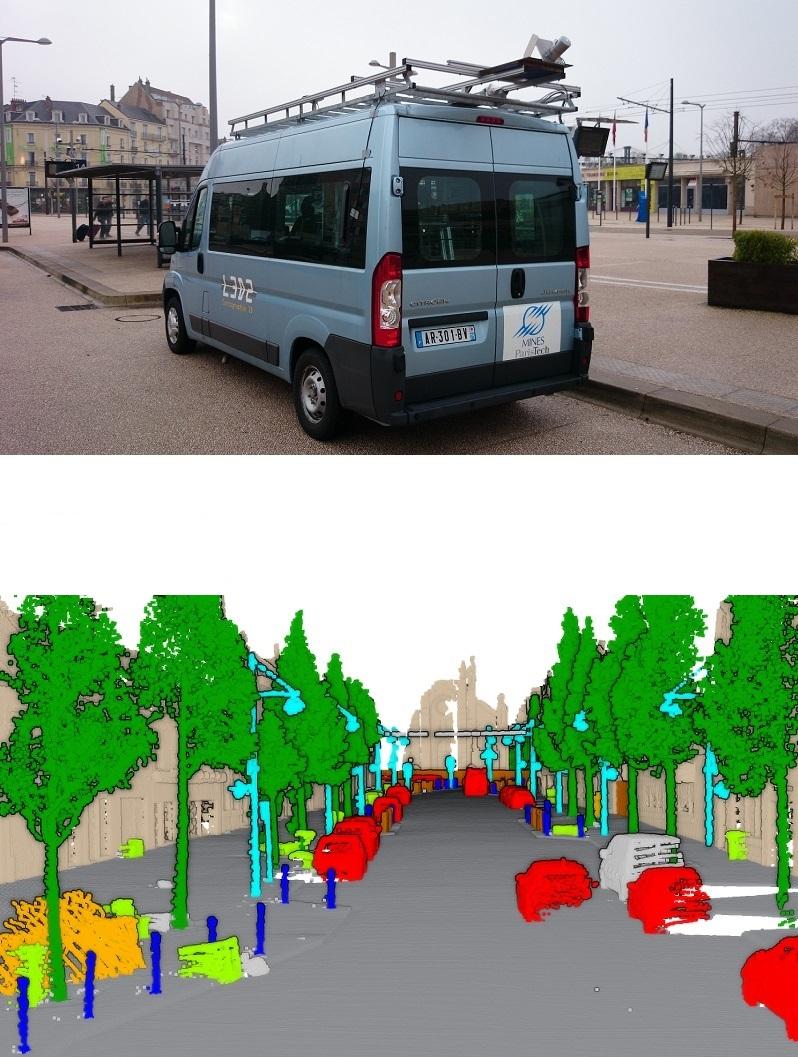
22 June 2018: We release a large training Point Cloud Dataset produced from a Mobile Laser System (MLS) in two different cities in France (Paris and Lille). The Point Cloud has been labeled entirely by hand with 50 different classes to help the research community on automatic point cloud segmentation and classification algorithms. You can download the data by clicking here.